Beyinsiz robotlardan karmaşık ve ritmik davranış: Hava basıncıyla çalışıyor
İngiliz araştırmacılar, elektronik aksam, motor veya bilgisayar içermeyen, yalnızca hava basıncıyla çalışan yeni bir yumuşak robot sınıfı geliştirdi. ‘Akışkan robotlar’ olarak adlandırılan bu modüler cihazlar, ritmik ve karmaşık hareketler üretebiliyor, hatta harici bir kontrol olmadan, fiziksel yapıları sayesinde eylemlerini otomatik olarak senkronize edebiliyorlar.

Oxford Üniversitesi liderliğindeki bir ekip, elektronik aksam, motor veya bilgisayar olmadan, yalnızca hava basıncı kullanarak çalışan yeni bir yumuşak robot sınıfı geliştirdi. Advanced Materials dergisinde yayınlanan çalışma, bu 'akışkan robotların' karmaşık, ritmik hareketler üretebildiğini ve hatta eylemlerini otomatik olarak senkronize edebildiğini gösteriyor. Oxford Üniversitesi Mühendislik Bilimleri Bölümü RADLab Lideri Profesör Antonio Forte, "Beyinsiz makinelerin kendiliğinden karmaşık davranışlar üretebildiğini, işlevsel görevleri merkezden uzak noktalara dağıtabildiğini ve daha akıllı görevler için kaynakları serbest bırakabildiğini görmekten heyecan duyuyoruz" dedi.
Yumuşak robotlar (esnek malzemelerden yapılmış), engebeli arazilerde gezinme veya hassas nesneleri taşıma gibi görevler için idealdir. Yumuşak robotikteki temel amaçlardan biri, davranış ve karar alma süreçlerini doğrudan robotun fiziksel yapısına kodlayarak daha uyumlu ve duyarlı makineler üretmektir.
DOĞADAN İLHAM ALINDI
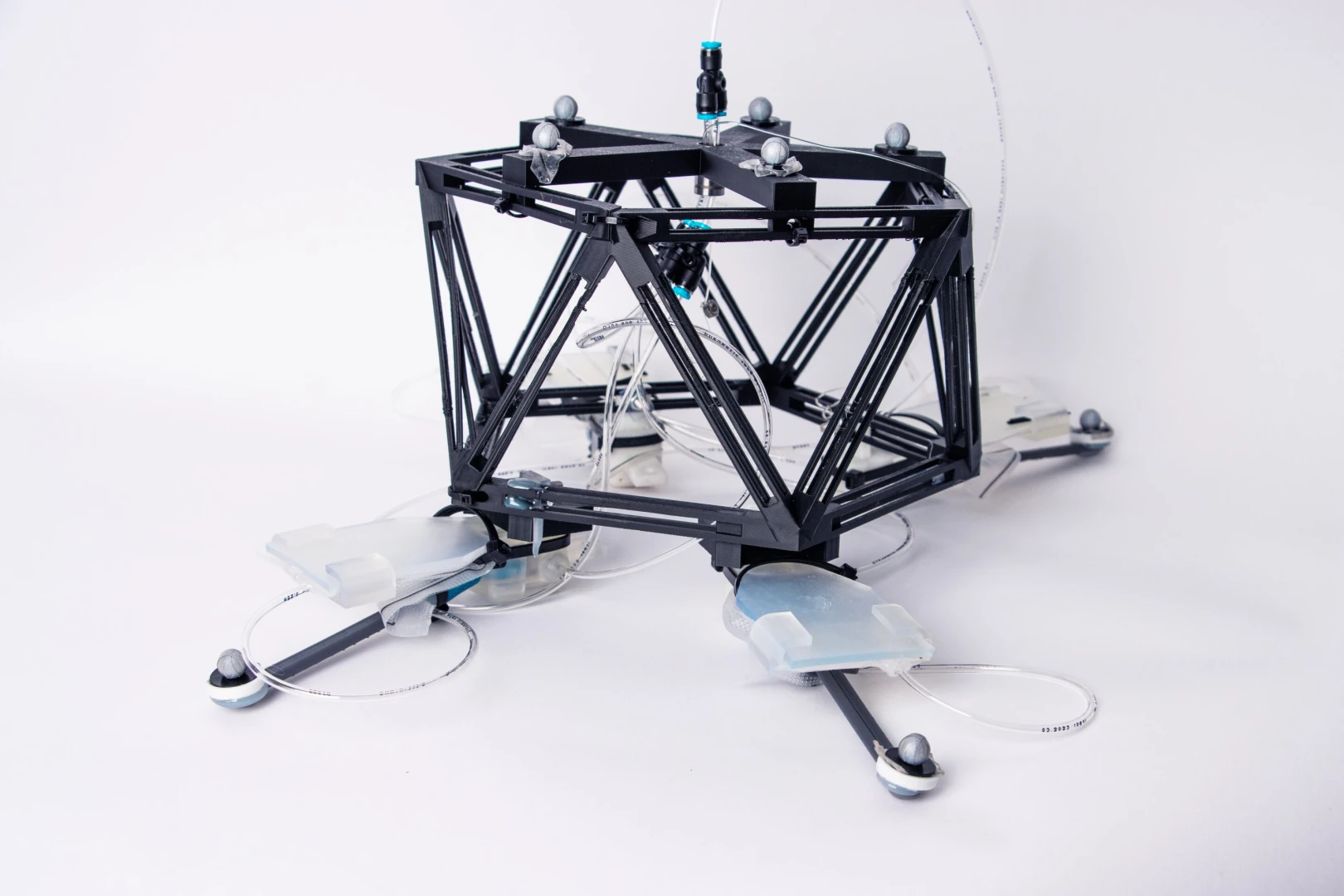
Araştırmacılar, karmaşık algılama, programlama ve kontrol sistemleri gerektiren geleneksel elektronik devrelerle kopyalanması zor olan otomatik davranışları geliştirmek için doğadan ilham aldılar. Temel yenilikleri, mekanik görevleri yerine getirmek için hava basıncını kullanan küçük ve modüler bir bileşen geliştirmekti. Bu tek blok, nasıl kurulduğuna bağlı olarak bir kas gibi hareket edebiliyor, dokunma sensörüne benzer şekilde basınç değişikliklerini algılayabiliyor veya bir vana/mantık kapısı gibi hava akışını AÇIK/KAPALI durumları arasında değiştirebiliyor.
LEGO parçalarına benzer şekilde, birden fazla özdeş ünite (her biri birkaç santimetre boyutunda) birbirine bağlanarak temel donanım tasarımını değiştirmeden farklı robotlar oluşturulabiliyor. Araştırmacılar, çalışmada zıplayabilen, sallanabilen veya sürünebilen masaüstü robotlar inşa ettiler.
OTONOM SENKRONİZASYON
Araştırmacılar, belirli bir konfigürasyonda, her bir birimin üç rolü aynı anda otomatik olarak birleştirebildiğini ve bu sayede sürekli basınç uygulandığında tamamen kendi kendine ritmik hareket üretebildiğini keşfettiler. Bu duyarlı birimlerden birkaçı birbirine bağlandığında, hareketleri herhangi bir bilgisayar kontrolü veya programlaması olmadan doğal olarak senkronize olmaya başlıyor.
Bu davranışlar, dönen bir platformu eğerek boncukları farklı kaplara ayırabilen bir sallama robotu ve bir paletli robot (bir masanın kenarını algılayıp otomatik olarak durarak düşmeyi önleyebilen) yapımında kullanıldı. Her iki durumda da, koordineli hareketler tamamen mekanik olarak, harici bir elektronik kontrol olmadan gerçekleştirildi.
Başyazar Dr. Mostafa Mousa, bu kendiliğinden oluşan koordinasyonun önceden belirlenmiş talimatlara ihtiyaç duymadığını, tamamen birimlerin birbirine bağlanma biçiminden ve çevreyle etkileşimlerinden kaynaklandığını ifade etti.
FİZİKSEL TEMAS KİLİT
Araştırmacılar, bu davranışı açıklamak için Kuramoto modeli adı verilen matematiksel bir çerçeve kullanarak, robotların çevreyle mekanik olarak birleştiğinde, yalnızca fiziksel tasarımlarından kaynaklanan karmaşık ve koordineli hareketlerin ortaya çıkabileceğini ortaya koydu. Bu durumda, her bir robotik bacağın hareketi, paylaşılan vücut ve zemin tepki kuvvetleri aracılığıyla diğerlerini gizlice etkiliyor.
Dr. Mousa, ateş böceklerinin birbirlerinin ışıklarını izleyerek senkronize biçimde parlamasına benzer şekilde, robotun hava basıncıyla çalışan uzuvlarının da görsel ipuçları yerine zeminle kurduğu fiziksel temas sayesinde kendi içinde bir ritim yakaladığını belirtti.
Profesör Forte, karar verme ve davranışın doğrudan robotun fiziksel yapısına kodlanmasının, "düşünmek" için yazılıma ihtiyaç duymayan, uyarlanabilir ve tepkisel makinelere yol açabileceğini; bunun da "beyinli robotlar"dan "kendi beyinleri olan robotlara" geçiş anlamına geldiğini sözlerine ekledi.

Meta, sürekli kayıt alabilen 'süper algılama'lı yeni akıllı gözlükleri test ediyor

Avustralyalı ABC, haber üretiminde Claude yapay zekasını kullanacak

Yapay zeka iki yeni süperiletken malzemenin keşfini hızlandırdı

SpaceX, son altı ayda 260 Starlink uydusunu imha etti

Hayabusa2, 100 milyon km uzaktaki Torifune asteroitinin yakınından geçti

MeerKAT teleskobu 'Mavi Gözlü Pulsar'dan radyo sinyalleri yakaladı

Otonom sistemler için dünyanın ilk sertifikalı 3D ultrasonik sensörü tanıtıldı

Çin, ABD ambargolarını aşmak için 3D yığınlama teknolojisine yatırım yapıyor
Yorum yazmak için giriş yapın.
Yorumlar yükleniyor…