Becerikli robotik el: İnsan gibi algılıyor
Güney Kaliforniya Üniversitesi’nden bilim insanları, sıcak yüzeylerde çalışabilen ve farklı nesneleri yüksek hassasiyetle algılayabilen gelişmiş bir robotik el geliştirdi. MOTIF adı verilen bu yeni platform, robotların insan becerilerine yaklaşmasında önemli bir adım olabilir.

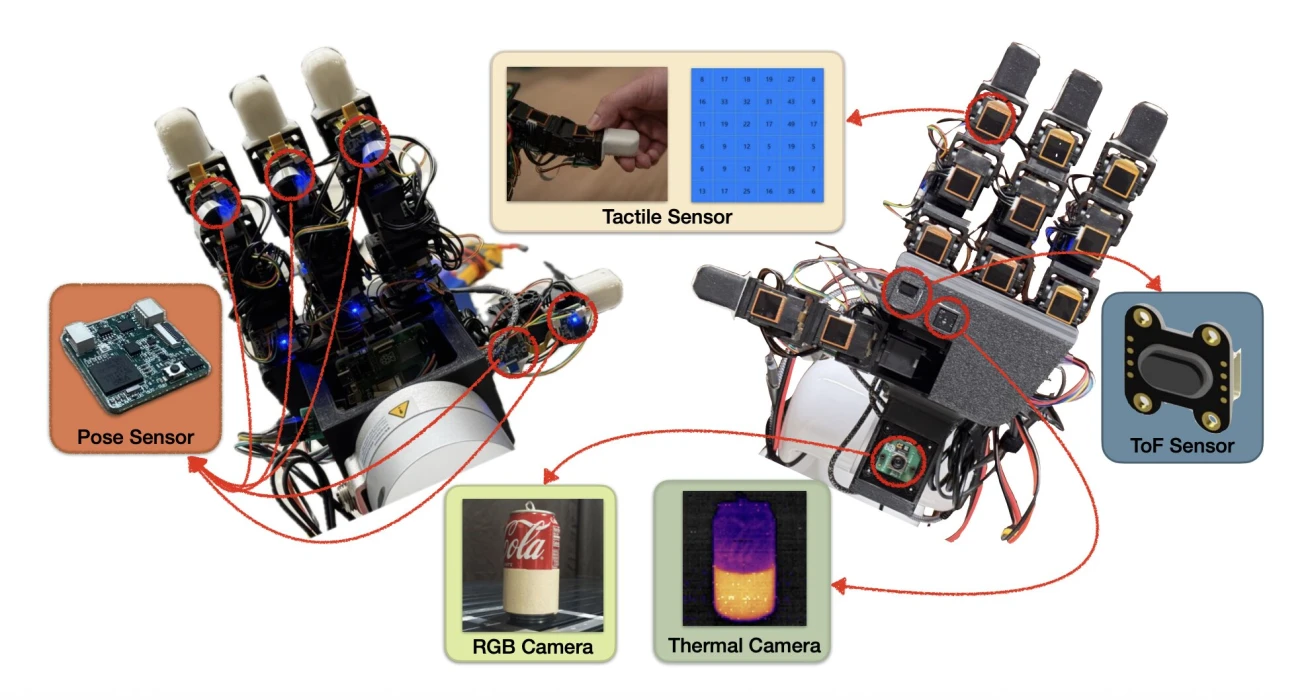
Güney Kaliforniya Üniversitesi’nden bir araştırma ekibi, robotik manipülasyonda yeni bir çığır açabilecek çok modlu bir robotik el geliştirdi. MOTIF (Termal, Eylemsizlik ve Kuvvet Sensörlü Çok Modlu Gözlem) adı verilen bu el, görsel, termal, dokunsal ve eylemsizlik sensörlerini bir araya getirerek robotların çevreyle daha hassas ve güvenli şekilde etkileşim kurmasını sağlıyor.
Araştırmacılar, MOTIF’in temel çıkış noktasını “insan elinin karmaşık algısal özelliklerine yaklaşma ihtiyacı” olarak açıklıyor. Projenin arkasındaki ekipten Daniel Seita, Hanyang Zhou, Wenhao Liu ve Haozhe Lou, “Geleneksel robotik ellerin çoğu, entegre çoklu algılama yeteneklerinden yoksun. Biz bunu değiştirmek istedik” ifadelerini kullandı.
SICAK NESNELERE TEMAS
MOTIF, özellikle yüksek sıcaklıklı veya fiziksel olarak hassas nesnelerin manipülasyonunda etkileyici bir performans sergiliyor. Elde edilen sonuçlara göre, robotik el sadece sıcak nesneleri tespit etmekle kalmıyor, aynı zamanda yüzeylerindeki sıcak bölgelere temas etmekten de kaçınabiliyor. Bu da sıcak ortamlarda güvenli çalışmayı mümkün kılıyor.
İkinci bir deneyde, aynı görünüme sahip ama farklı kütlelere sahip nesneler MOTIF tarafından parmak ucu hareketleriyle sınıflandırıldı. Bu deney, sistemin atalet farklarını algılayarak kütle tahmininde bulunabileceğini ortaya koydu.
HASSAS KÜTLE ALGILAMA
Proje ekibi, MOTIF’in nesneye özel stratejiler belirlemesini sağlayan bu bütüncül algı yapısının, robotların gerçek dünya görevlerinde daha etkili hale gelmesini sağlayabileceğini belirtiyor. Araştırmalar, özellikle ev işleri, profesyonel mutfaklar, endüstriyel üretim ve kaynak işlemlerinde büyük fayda sağlayacağını gösteriyor.
Lou, “En büyük başarı, çoklu sensörlerin tek bir platforma entegre edilerek manipülasyon kapasitesinin çarpıcı biçimde artmasıdır” diyerek sistemin etkisini özetledi.
ÇOKLU ORTAM UYUMLULUĞU
Araştırma ekibi, ileride yüksek çözünürlüklü parmak sensörlerinin entegre edilmesi, çok modlu veri işleme algoritmalarının geliştirilmesi ve daha karmaşık uygulamalara yönelik testler yapılması için çalışacaklarını belirtti. Proje, geçtiğimiz hafta Santa Fe’deki ISER 2025 konferansında da sunuldu.
Zhou, “Bu çalışmanın, robotik topluluğunda yeni algılama stratejilerinin düşünülmesine ilham vermesini umuyoruz” dedi.

Meta, sürekli kayıt alabilen 'süper algılama'lı yeni akıllı gözlükleri test ediyor

Avustralyalı ABC, haber üretiminde Claude yapay zekasını kullanacak

Yapay zeka iki yeni süperiletken malzemenin keşfini hızlandırdı

SpaceX, son altı ayda 260 Starlink uydusunu imha etti

Hayabusa2, 100 milyon km uzaktaki Torifune asteroitinin yakınından geçti

MeerKAT teleskobu 'Mavi Gözlü Pulsar'dan radyo sinyalleri yakaladı

Otonom sistemler için dünyanın ilk sertifikalı 3D ultrasonik sensörü tanıtıldı

Çin, ABD ambargolarını aşmak için 3D yığınlama teknolojisine yatırım yapıyor
Yorum yazmak için giriş yapın.
Yorumlar yükleniyor…