İnsansı robot Unitree G1’den akıcı basketbol hareketleri
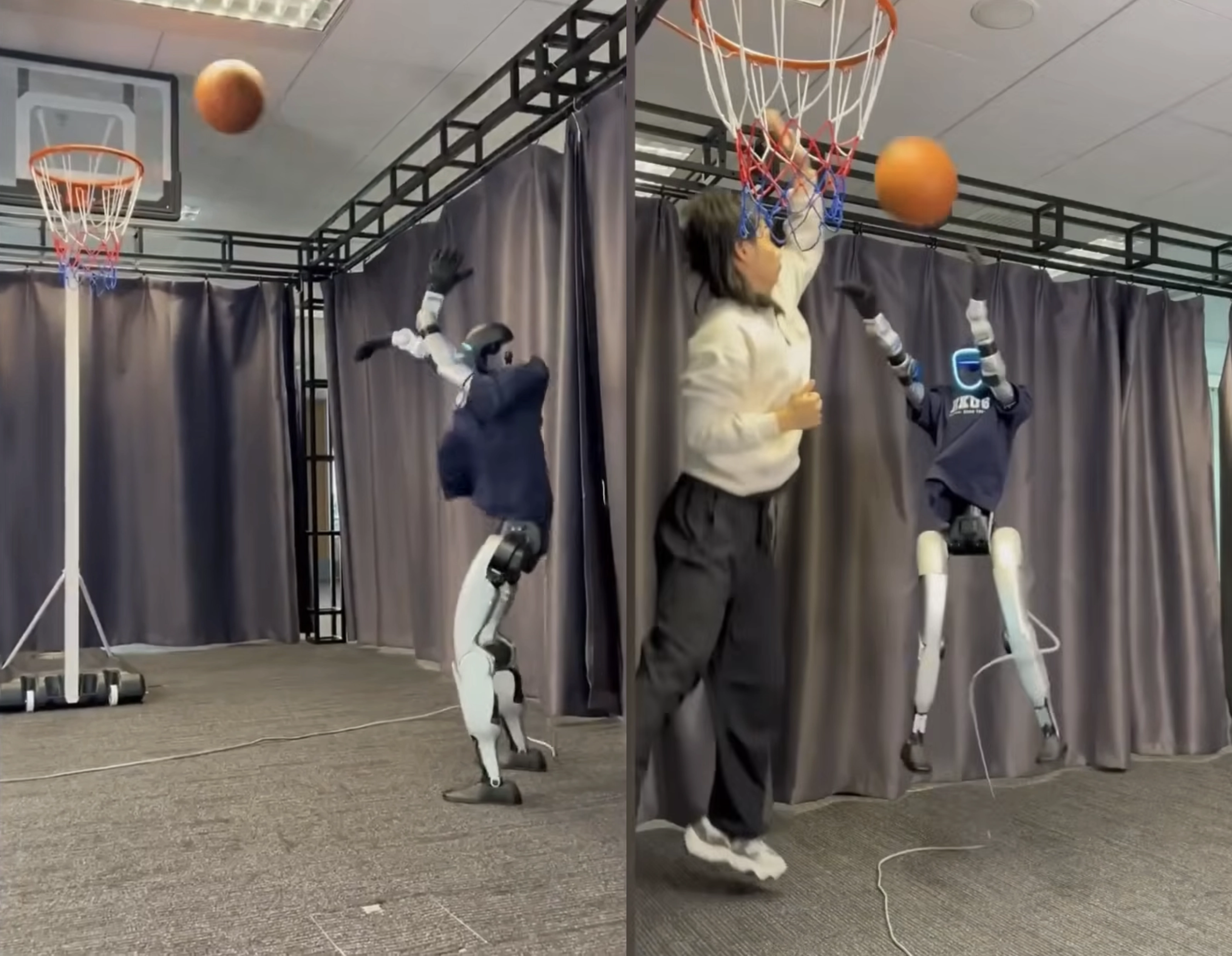
Unitree Robotics’in G1 insansı robotu, Hong Kong’da gerçekleştirilen gösteride üç adımlı turnike, top sürme ve şut gibi basketbol hareketlerini başarıyla yerine getirdi. Robot, tüm hareketleri SkillMimic adlı yapay zekâ eğitim sistemiyle öğrendi.

Hong Kong Bilim ve Teknoloji Üniversitesi (HKUST), Unitree Robotics tarafından geliştirilen G1 insansı robotun basketbol becerilerini sergilediği yeni bir laboratuvar gösterimi yayımladı. ‘Küçük Patates’ lakabıyla anılan robot, üç adımlı turnike, top sürme, pas ve şut gibi temel basketbol hareketlerini akıcı bir şekilde gerçekleştirdi.
YAPAY ZEKA DESTEKLİ ÖĞRENME
Gösterideki başarının temelinde SkillMimic adlı yapay zekâ çerçevesi bulunuyor. Sistem, video ve hareket izleme kıyafetleriyle kaydedilen insan hareketlerini analiz ediyor ve robotun binlerce simülasyon çalışmasıyla bu hareketleri kararlı bir şekilde yeniden üretmesini sağlıyor. Araştırmacılar, tek bir politikanın birden fazla beceriyi birleştirebildiğini ve referans verilerde bulunmayan geçişlerin bile akıcı şekilde yapılabildiğini belirtiyor.
HAREKET AKIŞINI SAĞLAYAN YENİ YÖNTEMLER
SkillMimic-V2 sisteminin başarısı üç temel yöntem üzerine kurulu:
Dikişli yörünge grafiği (STG): Farklı becerilerdeki benzer vücut pozisyonlarını birleştirerek robotun yeni geçiş yolları oluşturmasını sağlıyor.
Durum geçiş alani (STF): Robotu her çalışmada farklı başlangıç noktalarından başlatarak hata yönetimini öğretiyor.
Uyarlanabilir yörünge örneklemesi (ATS): Zor hareketlere ekstra ağırlık vererek robotun uzun görevlerde stabil kalmasını amaçlıyor.
Bu yöntemler sayesinde robot, top sürme ile şut arasında kesintisiz geçişler yapabiliyor.
SİMÜLASYONDAN SAHAYA
Araştırma ekibi, top sürme, şut, turnike ve top kapma dahil yedi temel hareket üzerinde eğitilmiş tek bir etkileşim becerisi politikası kullandı. Sistem, 4,5 milyar simüle edilmiş örnekle eğitildi. Gösterimde G1’in sahada doğal bir hızla top sürdüğü, turnike attığı ve şut kullandığı gözlendi. Robotun dengesini kaybedip hızla toparlanabilmesi, öğrenilen hareketlerin kararlılığını ortaya koydu.
GELECEK ÇALIŞMALARI
Araştırma ekibi, ilerleyen süreçte tek bir politikanın farklı nesneleri nasıl yöneteceğini incelemeyi, daha küçük veri kümeleriyle eğitim yapmayı ve becerilerin simülasyon dışındaki gerçek maç ortamlarında uygulanmasını hedefliyor.

Meta, sürekli kayıt alabilen 'süper algılama'lı yeni akıllı gözlükleri test ediyor

Avustralyalı ABC, haber üretiminde Claude yapay zekasını kullanacak

Yapay zeka iki yeni süperiletken malzemenin keşfini hızlandırdı

SpaceX, son altı ayda 260 Starlink uydusunu imha etti

Hayabusa2, 100 milyon km uzaktaki Torifune asteroitinin yakınından geçti

MeerKAT teleskobu 'Mavi Gözlü Pulsar'dan radyo sinyalleri yakaladı

Otonom sistemler için dünyanın ilk sertifikalı 3D ultrasonik sensörü tanıtıldı

Çin, ABD ambargolarını aşmak için 3D yığınlama teknolojisine yatırım yapıyor
Yorum yazmak için giriş yapın.
Yorumlar yükleniyor…