Binlerce robot tek vücut: Yeni çerçeve sürü zekasını hızlandırıyor
Araştırmacılar, kuş ve balık sürülerindeki kolektif davranışı taklit eden robot sürüleri için geometrik tasarım kuralları geliştirdi. Çerçeve, her robota pozitif/negatif ‘eğrilik’ değeri atayarak merkezi komut olmadan akın, sürü halinde ilerleme ve kümelenme gibi toplu hareketleri kontrol etmeyi mümkün kılıyor.


Yapay zekanın sürü davranışlarını modelleyen kolu ‘sürü zekası’ için yeni bir dönüm noktası duyuruldu. New York Üniversitesi (NYU) bünyesindeki ekip, robotların tek bir lider ya da merkezi komut olmadan, doğadaki kuş, balık ve arı sürülerine benzer biçimde uyumlu hareket etmesini sağlayan geometrik bir kontrol çerçevesi sundu. Çalışma, robot sürülerinin arama-kurtarma operasyonları, orman yangını tespiti ve geniş alan gözetleme gibi misyonlarda hızlı, senkronize ve dayanıklı biçimde görev yapmasını hedefliyor.
MERKEZİSİZ KONTROL ŞART
Ekip, sürü robotiklerinin en zorlu engellerinden birinin merkezi olmayan kontrol olduğunu vurguluyor. Doğal sürüler tek bir otorite olmadan öz-örgütlenme sergilerken, sentetik sürüler bugüne dek aynı çeviklik ve ölçeklenebilirliğe ulaşmakta zorlanıyordu. NYU’dan Matan Yah Ben Zion’un ifade ettiği gibi araştırma, tekil komut yerine yerel etkileşimlerden doğan küresel düzeni hedefleyerek bu açığı kapatmayı amaçlıyor.
EĞRİLİK TEMELLİ ÇERÇEVE
Yeni çerçevenin temelinde, proton ve elektronların pozitif/negatif yük kavramına benzetilen “eğrilik” adlı içsel bir nicelik yatıyor. Her bir robota pozitif ya da negatif eğrilik atanarak komşu robotlarla çekim-itme dinamikleri belirleniyor. Bu sayede sürünün sürüklenme (flocking), akın (swarming) ya da kümeleşme (clustering) gibi toplu davranış kipleri geometrik olarak ayarlanabiliyor. NYU’dan Stefano Martiniani’nin altını çizdiği üzere, bu yaklaşım sürü davranışını malzeme-mekanik düzeyinde ayarlama imkanı veriyor.
LABORATUVARDAN SAHAYA
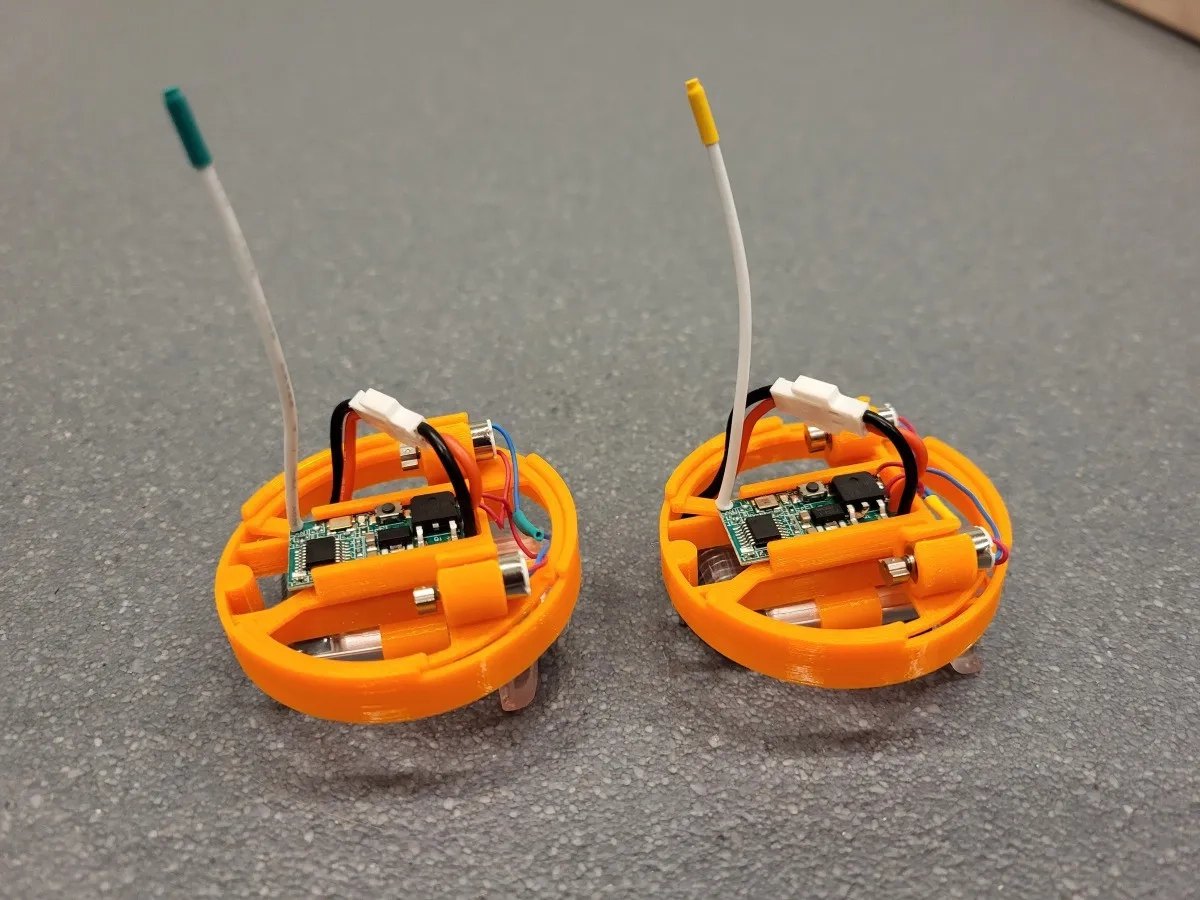
Araştırmacılar, deneylerde eğrilik tabanlı kriterlerin robot çiftleri arasındaki etkileşimi nasıl yönettiğini gösterdi; ilke, binlerce robota ölçeklenecek biçimde tasarlandı. Önemli bir bulgu da, bu kuralların robotların mekanik tasarımına gömülebilmesi: Böylece karmaşık yazılım protokolleri yerine donanım düzeyinde basit ve güvenilir bir kontrol mekanizması kurulabiliyor. Yaklaşım, büyük endüstriyel/dağıtım robotları kadar, ilaç dağıtımı gibi tıbbi uygulamalar için geliştirilen mikro robotlara da uygulanabilir.
GENİŞ UYGULAMA ALANI
Sürü kontrolünün geometrik kurallarla ele alınması, problemi karmaşık bir yazılım meselesinden malzeme bilimi ve tasarım konusuna dönüştürüyor. Alan, son dönemde hızla olgunlaşıyor: H2 Clipper nisan ayında büyük ölçekli havacılık üretiminde robot sürülerine dair patent aldı; Pensilvanya’dan bir ekip, minik robotların yalnızca yakın çevre kurallarıyla petek benzeri kompleks yapılar kurabildiği merkezisiz stratejiler geliştirdi. NYU’nun eğrilik temelli çerçevesi, bu ilerlemelere ölçeklenebilir, donanım-dostu bir kontrol dili ekliyor.

Meta, sürekli kayıt alabilen 'süper algılama'lı yeni akıllı gözlükleri test ediyor

Avustralyalı ABC, haber üretiminde Claude yapay zekasını kullanacak

Yapay zeka iki yeni süperiletken malzemenin keşfini hızlandırdı

SpaceX, son altı ayda 260 Starlink uydusunu imha etti

Hayabusa2, 100 milyon km uzaktaki Torifune asteroitinin yakınından geçti

MeerKAT teleskobu 'Mavi Gözlü Pulsar'dan radyo sinyalleri yakaladı

Otonom sistemler için dünyanın ilk sertifikalı 3D ultrasonik sensörü tanıtıldı

Çin, ABD ambargolarını aşmak için 3D yığınlama teknolojisine yatırım yapıyor
Yorum yazmak için giriş yapın.
Yorumlar yükleniyor…